Vassilis Athitsos
VLM Lab
3D Hand Pose Estimation
The 3D pose of a hand is defined by the joint angles and the
orientation of the hand. Different configurations of joint angles lead
to different hand shapes. The same hand shape can look very different
depending on its 3D hand orientation. The joint angles in a hand can
be specified using 20 parameters. Three additional parameters are
needed for the 3D orientation of the hand. Therefore, 3D hand pose is
specified using a total of 23 parameters.
|
|
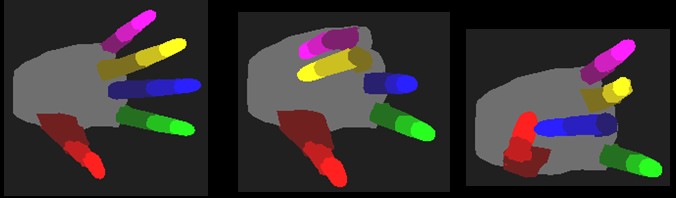
Figure 1: Three different hand shapes. Each hand shape corresponds to
a different configuration of joint angles.
|
|
|
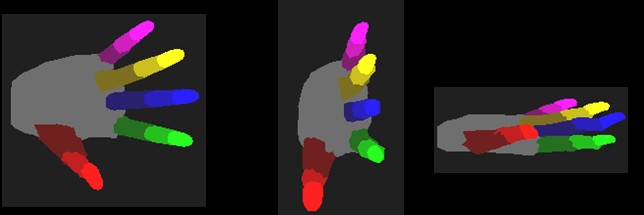
Figure 2: Three different views of a single hand shape. Each view
corresponds to a different 3D hand orientation.
|
In this project, 3D hand pose estimation is formulated as an image
database indexing problem. A large database of synthetic hand images
is created, that contains images of various hand shapes under various
3D orientations. For each synthetic image, the system knows the hand
shape and 3D orientation that was used to create it. To estimate the
3D hand pose of an input image, the most similar images in the database
are retrieved. The hand pose parameters associated with those
images are used as estimates for the hand pose in the input image. The
database images are created using computer graphics.
|
|
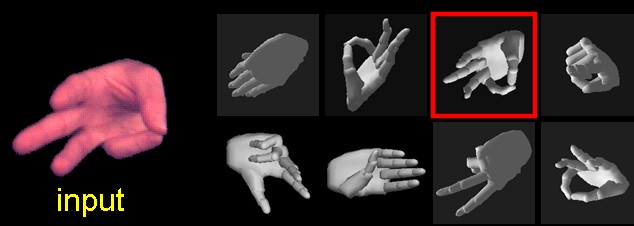
Figure 3: System input and output. Given the input image, the system
goes through the database of synthetic images in order to identify the
ones that are the most similar to the input image. Eight examples of
database images are shown here, and the most similar one is enclosed
in a red square. The database currently used contains more than
100,000 images.
|
Main Challenges
Building a Large Database
In order to correctly estimate the hand pose in an image, the database
must contain a synthetic image with similar hand pose. A question that
arises is: how many database images do we need in order to guarantee
that for every possible hand pose there will be a similar database
image? We do not have an answer to this question at this point. The
answer partly depends on a definition of when two images are
"similar"; the more stringent our criteria for similarity are, the
more database images we need.
In our current implementation, the database includes images of 26 hand
shapes. Each hand shape is rendered from 4128 different 3D hand
orientations. Overall, the database contains 107,328 images. Our
sampling of 26 hand shapes is definitely inadequate to capture the
entire range of possible hand shapes. On the other hand, our sampling
of 3D hand orientations is an approximately uniform and dense sampling
of the space of 3D orientations.
|
|
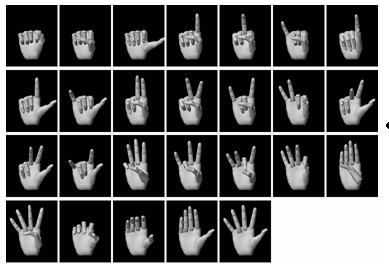
Figure 4: The 26 hand shapes used to generate the over 100,000
database images.
|
Recognizing a fixed number of hand shapes is not as general as recognizing
arbitrary 3D hand pose. However, it can be sufficient for many gesture
recognition applications. For example, the number of basic hand shapes used
in American Sign Language (ASL) is less than 100, which means that our
framework is applicable to recognizing hand pose in the ASL context.
Defining Accurate Similarity Measures
Given an input image, the system must retrieve the most similar
database images. Therefore, we need to address the question: how do we
define similarity? We need to identify similarity measures that return
high similarity value for images of similar hand pose, and low
similarity values for images of different hand poses.
We have experimented with several different similarity measures: the
chamfer distance, geometric moments, edge orientation histograms, finger
matching, and line matching. Our experiments show that the chamfer distance
is the most accurate similarity measure, but also the most computationally
expensive measure. Current work focuses on developing similarity measures
that can improve the accuracy and efficiency of the system. We are
particularly interesting in similarity measures that are robust to noise,
clutter, and segmentation errors. Our line matching method, described in
our CVPR 2003 publication, is a first result in that direction.
Achieving Efficient Retrieval
For every input image, the system has to evaluate its similarity to
all database images. That task can be very time-consuming, given the
size of the database. On the other hand, in order for the system to
be useful for human-computer interaction applications, the retrieval
time must be done at interactive speeds.
We have found that retrieval efficiency is greatly improved if we use
multi-step retrieval: first use computationally cheap similarity measures
(like finger matching and geometric moments) to reject the bulk of database
images, and then use more accurate similarity measures (like the chamfer
distance) to evaluate the remaining database images. Retrieval accuracy, on
the other hand, is pretty similar to the accuracy attained by applying all
similarity measures to all images.
Another direction that we have explored for retrieval efficiency is
deriving efficient approximations of computationally expensive
similarity measures, like the chamfer distance. In our GW 2003 and
CVPR 2003 publications we define approximations of the chamfer
distance using a technique called Lipschitz embeddings. These
approximations are ideal for the first retrieval steps, that identify
the most likely matches. The exact measures can then be applied only
to the selected matches, so that the overall efficiency is
improved. Our CVPR 2004 paper introduces the BoostMap method, a
general method for constructing embeddings. Applied on hand images,
BoostMap greatly improves the approximation of the chamfer distance.
References
The papers in Cues in Communications 2001 and
Face and Gesture 2002 describe the overall framework, the
assumptions and the goals of the project. The papers in CVPR
2003 and the Gesture Workshop 2003 focus on methods to
improve efficiency and accuracy in the presense of clutter and
segmentation errors. The paper in CVPR 2004 introduces a
general embedding method that can be used to efficiently approximate
the chamfer distance.
-
3D Hand Pose Estimation by Finding Appearance-Based Matches in a Large
Database of Training Views.
Vassilis Athitsos and Stan Sclaroff.
IEEE Workshop on Cues in Communication, December 2001.
[Postscript 2.5MB]
[Compressed Postscript 597KB]
[ PDF 367KB]
Extended version (Technical Report BUCS-2001-021):
[
Postscript 4.0MB]
[
Compressed Postscript 777KB]
[
PDF 470KB]
-
An Appearance-Based Framework for 3D Hand Shape Classification and
Camera Viewpoint Estimation.
Vassilis Athitsos and Stan Sclaroff.
IEEE Conference on Automatic Face and Gesture Recognition,
pages 45-52, May 2002.
[Postscript 1.7MB]
[Compressed Postscript 682KB]
[PDF 549KB]
Extended version (Technical Report BUCS-2001-022):
[
Postscript 6.3MB]
[
Compressed Postscript 1.3MB]
[
PDF 716KB]
-
Database Indexing Methods for 3D Hand Pose Estimation.
Vassilis Athitsos and Stan Sclaroff.
Gesture Workshop, pages 288-299, April 2003.
[Postscript 3.7MB]
[Compressed Postscript 587KB]
[PDF 267KB]
-
Estimating 3D Hand Pose from a Cluttered Image.
Vassilis Athitsos and Stan Sclaroff.
IEEE Conference on Computer Vision and Pattern
Recognition (CVPR), pages 432-439, June 2003.
[Postscript 7.4MB]
[Compressed Postscript 1.7MB]
[PDF 594KB]
-
BoostMap: A Method for Efficient Approximate Similarity Rankings.
Vassilis Athitsos, Jonathan Alon, Stan Sclaroff, and George Kollios.
IEEE Conference on Computer Vision and Pattern
Recognition (CVPR), pages 268-275, June 2004.
[Postscript 2.6MB]
[Compressed Postscript 588KB]
[PDF 229KB]
-
Vassilis Athitsos, Jonathan Alon, Stan Sclaroff, and George Kollios.
BoostMap: An Embedding Method for Efficient Nearest Neighbor Retrieval.
IEEE Transactions on Pattern Analysis and Machine Intelligence (PAMI)
,
30(1), pages 89-104, January 2008.
[Postscript 51MB]
[PDF 3.2MB]
[Pre-print in PDF with color images 632KB]
-
Michalis Potamias and Vassilis Athitsos.
Nearest Neighbor Search Methods for Handshape Recognition.
Conference on Pervasive Technologies Related to Assistive Environments (PETRA), July 2008.
[Postscript 10.4MB]
[PDF 259KB]
Vassilis Athitsos
VLM Lab