An open-world simulated environment for developmental robotics
Abstract
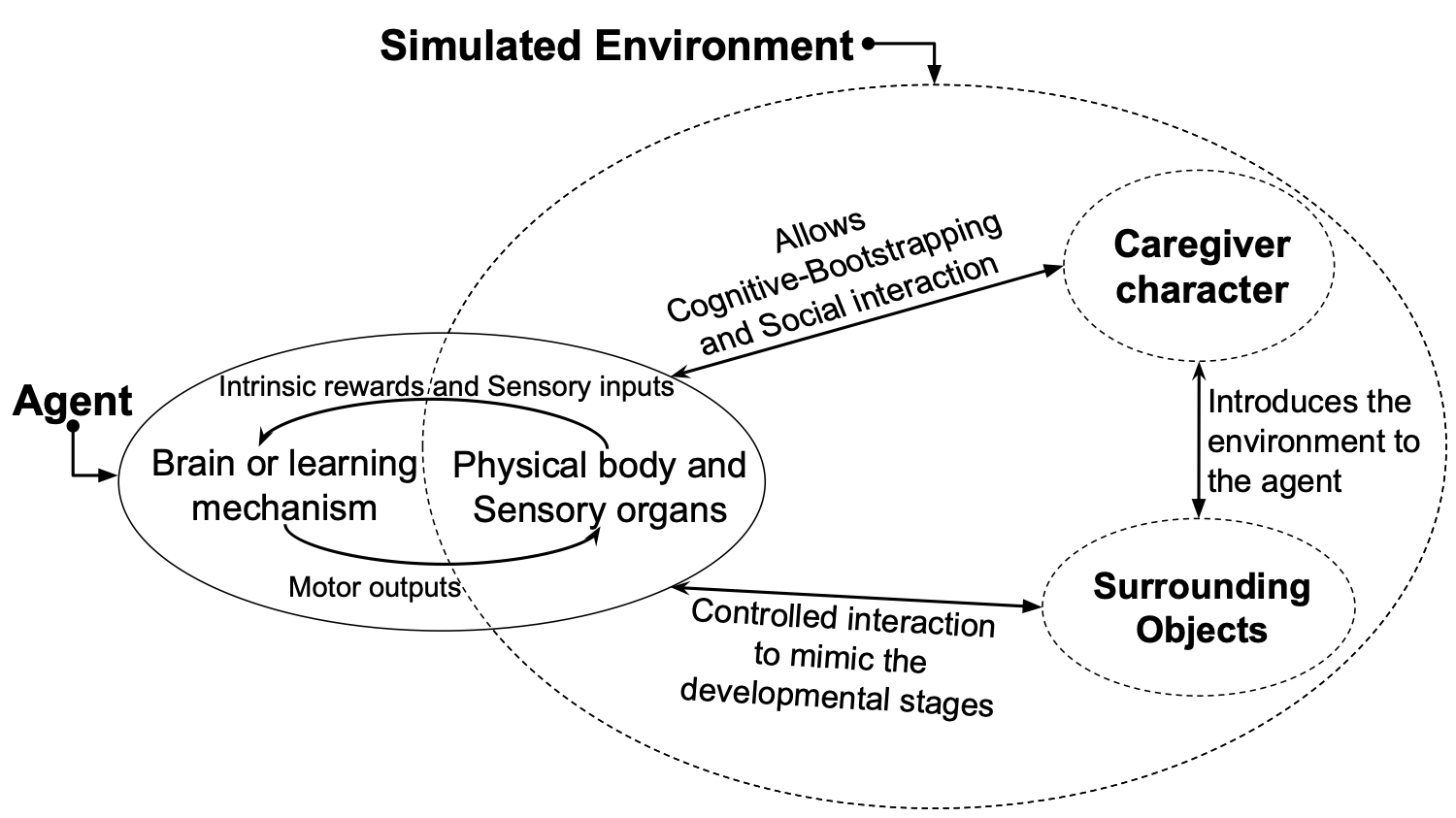
As the current trend of artificial intelligence is shifting towards self-supervised learning, conventional norms such as highly curated domain-specific data, application-specific learning models, extrinsic reward based learning policies etc. might not provide with the suitable ground for such developments. In this paper, we introduce SEDRo, a Simulated Environment for Developmental Robotics which allows a learning agent to have similar experiences that a human infant goes through from the fetus stage up to 12 months. A series of simulated tests based on developmental psychology will be used to evaluate the progress of a learning model.
Type
Publication
Learning in Artificial Open Worlds at ICML 2020 Workshop
Date
September, 2020