Dr. Park’s research objective is to program human-level artificial intelligence (HLAI). Specially, he is interested in
- A rigorous definition of HLAI;
- An environment to develop and test HLAI; and
- A cognitive model for HLAI. Below is a brief introduction for each topic.
The term AI is used in a broad meaning, and HLAI is not clearly defined. He is working on the first theme, a rigorous definition of HLAI. He claims that the essence of Human-Level Intelligence (HLI) to be the capability to learn from others’ experiences via language. The key is that the event described by language has the same effect as if the agent experiences it firsthand. For example, let us say that you have never tried cola before. Then one day, you see a cup of cola as a sparkling black liquid. As a random exploration, you tasted it, and it felt good. Now your value function for the state would be updated according to this event. A similar change should have been brought if your friend tells you, “I saw a sparkling black liquid. I drank it, and it tasted good.” It requires that the language description and the sensory-motor signal should be transferrable.
You can read more about it here.
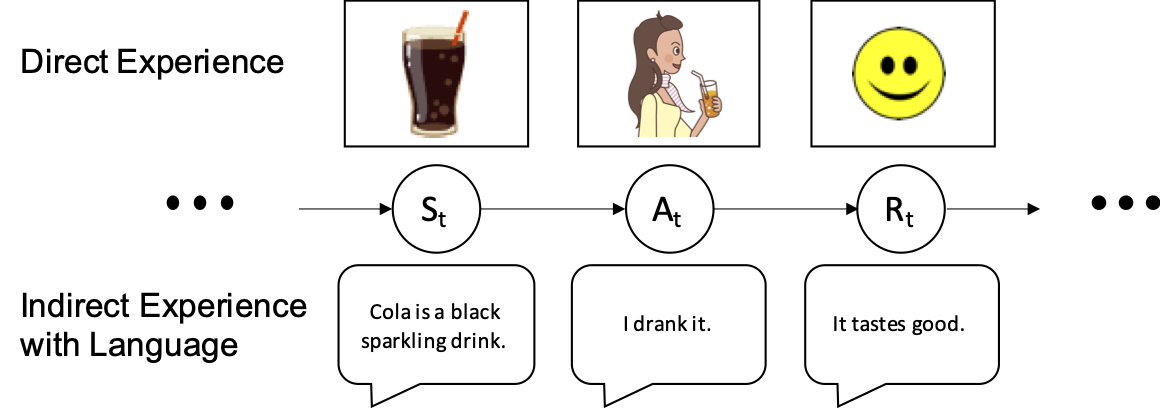
Learning with language means that the symbolic description brings the same changes to the model comparable to direct experiences.
To develop and test models with such a language capability, my students and I are developing a simulated environment. There is a 3D Home environment in this environment, and a mother character takes care of the baby and teaches languages. The baby is the learning agent. The environment provides it with comparable experiences to that of a human baby from birth to one year. You can learn more about the environment at the paper titled, SEDRo: a Simulated Environment for Developmental Robotics.

Screenshots from SEDRo environments. (a) Fetus environment. Almost dark space with no visual capability of the baby. (b) After birth house environment with a Mother character and some other toys. © Mother is feeding the baby. (d) Mother is showing a toy to the baby
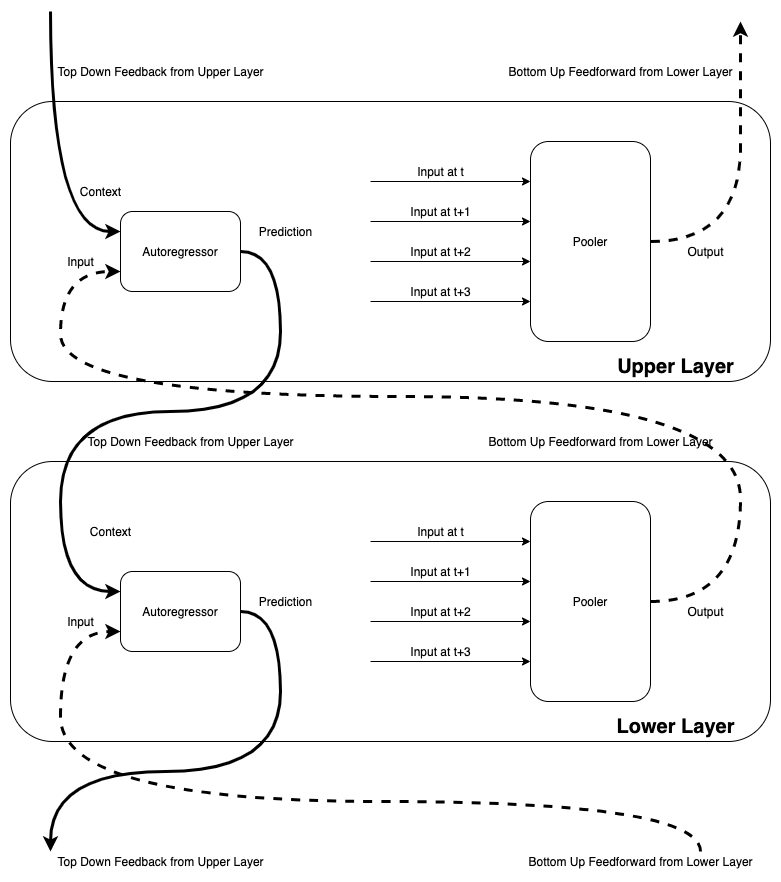
Using the environment as the testbed, I have been working on the implementation of HLAI. In my theory, there are three components of the human brain: instincts, functional components, and universal memory. Functional components are subcortical structures such as reward systems and the hippocampus. Universal memory is the neocortex, where I conjecture that homogenous modules are connected heterarchically. Each module predicts the next vector signal given the sequence of the sensory-motor signal. These modules are updated locally, in contrast to the traditional end-to-end approach where an entire network is updated according to the single objective or loss function. Also, the top-down signal from the higher layer provides a temporal and spatial context.