SEDRo: A Simulated environment for Developmental Robotics
Aishwarya Pothula, Md Ashaduzzaman Rubel Mondol, Sanath Narasimhan, Sm Mazharul Islam, Deokgun Park
Abstract
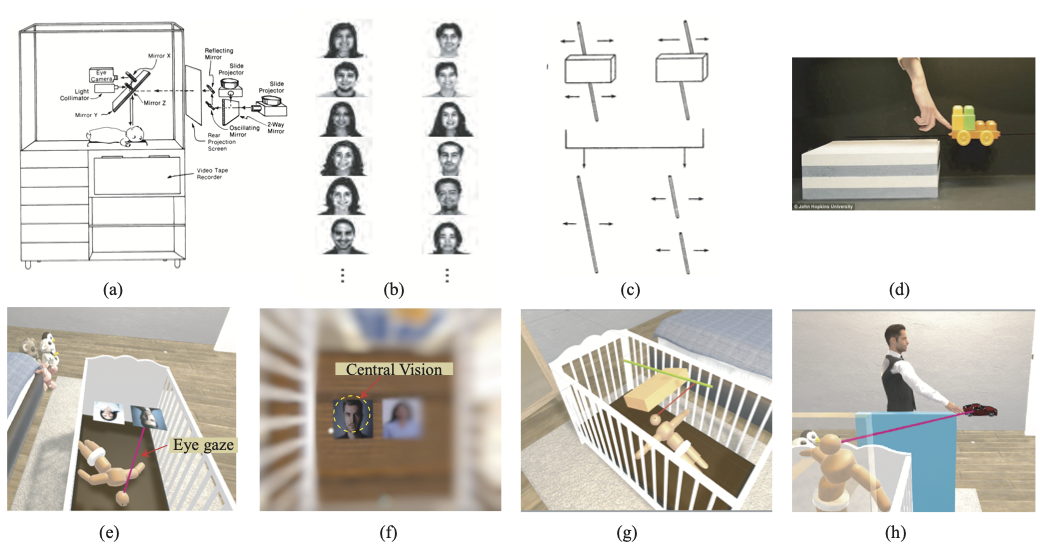
Even with impressive advances in application specific models, we still lack knowledge about how to build a model that can learn in a human-like way and do multiple tasks. To learn in a human-like way, we need to provide a diverse experience that is comparable to human’s. In this paper, we introduce our ongoing effort to build a simulated environment for developmental robotics (SEDRo). SEDRo provides diverse human experiences ranging from those of a fetus to a 12th month old. A series of simulated tests based on developmental psychology will be used to evaluate the progress of a learning model. We anticipate SEDRo to lower the cost of entry and facilitate research in the developmental robotics community.